
尊龙登录z6尊龙登录z6随着机器人技术的发展,软抓手技术在医疗手术、辅助维护、陆地救援、水下抓取和空间操作等领域发挥着重要作用,如何设计灵活高效的软抓手以适应各种应用环境是机器人领域的一个重要研究课题。近日,(Ocean Soft-Robot and Intelligent Sensing Lab,OASIS-LAB)在国际期刊上发表以“Advanced Technologies and Applications of Robotic Soft Grippers”为题的综述性论文,并当选Volume 9, Issue 11这项工作系统梳理了机器人软抓手的材料与制造技术、驱动技术、传感与控制技术。最后,从技术角度讨论了软抓手的几个主要应用领域,以及进一步发展可能面临的挑战。本综述旨在为未来机器人软抓手先进技术的发展和实际应用提供重要指导。
机器人软抓手是一个重要且不断扩展的研究领域。它主要是利用柔性材料的特性和生物形状设计,以一定的驱动模式与外部环境进行交互的独特装置。由于自动化需求的不断增加,医疗操作、辅助维护、陆地救援、水下抓取和空间操纵等领域对机器人软抓手的需求越来越大。然而,对于需要高度适应和交互的特定活动,传统的刚性夹具并不是理想的选择或最佳设计。由于软抓手由柔性材料制成,因此可以安全灵活地与周围环境相互作用,可以发挥更良好的抓取作用。
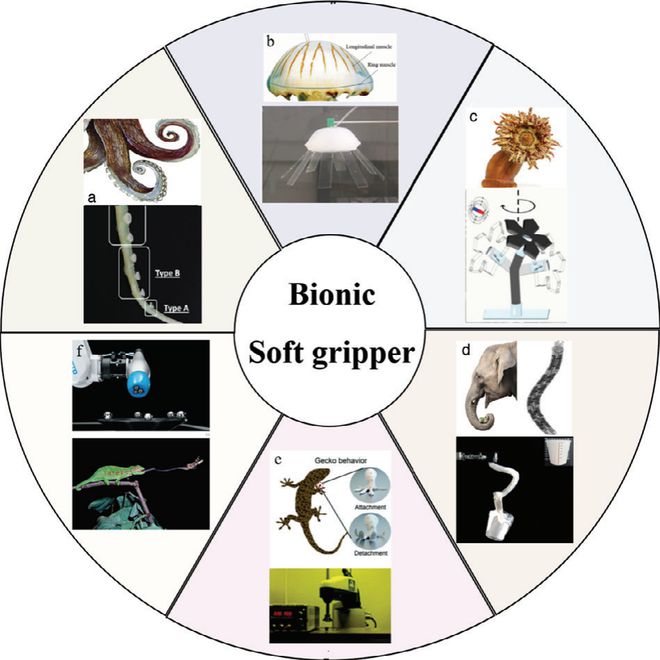
在解决各种工程问题时,大自然一直是人类的绝佳灵感来源。例如,飞机机翼的灵感来自于鸟类的翅膀。同样,一些动物一直是科学家和工程师设计软机器人和软抓手的重要灵感来源。不同的仿生原型也赋予了软抓手不同的特性。来自于章鱼、水母、海葵、大象、壁虎、变色龙等生物原型的机器人软抓手是仿生学设计的重要方向(图2)。
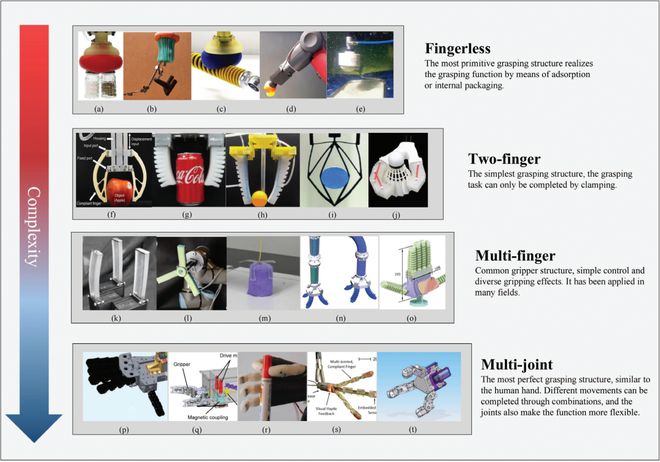
对于研究人员来说,研究机器人软抓手最直观、最直观的信息通常是外观。机器人软抓手通常根据其形态进行分类。比较并总结了各种设置中存在的夹具属性。因此,针对不同的任务环境设计具有不同特性的软质夹具非常重要。作者分别从手指数量、关节数量等方面进行分类(图3),探索了不同的机器人软抓手的设计和驱动方法。从基本结构的角度来看,指关节和关节的变化会产生整体功能和约束的变化。简单的结构往往更具适应性。但不可否认的是,更复杂、更灵活的机器人软抓手结构是未来研究的方向。
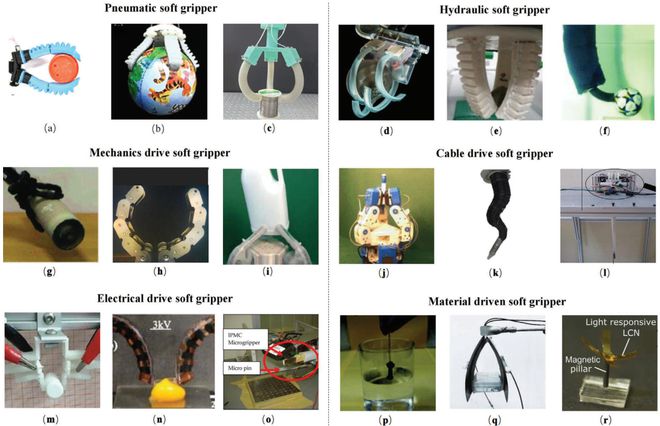
为了提高机器人软抓手的性能,灵活有效的抓取模式至关重要。研究人员根据不同的抓取任务,利用不同的驱动技术来驱动精致的机器人软抓手,本文比较和总结了不同驱动方法的特点(图4)。一般来说,最常用的是气动和液压驱动的压力驱动模式,它可以通过柔性材料的引导来完成物体抓取的任务。作为一种较为发达、稳定的惯用作动技术,机械驱动可以通过多段结构实现伪软件的形式,更加灵活可控。同时,在机器人软抓手领域引入电驱动和粒子来解决一些具体问题。
文章作者全面的调研了目前国内外学者在软体抓手机器人技术领域及其在尖端应用中的实际进展,作者提出了以下4点需要解决的挑战和可以探索的未来研究方向:
1.成本和效率:医疗领域的挑战之一是软抓手的成本。无系留手术是机器人软抓手的一个主要医学应用方向。这就要求机器人软抓手在微纳尺度上平衡足够的操作执行能力和操作精度尊龙人生就是博d88。结合机器人软抓手的弹性体特性,应变断裂成为常见问题。此外,考虑到靶向治疗的定向操作和微纳尺度特性,软质夹持器在微纳医疗领域的应用还需要在操作精度和响应速度上进一步突破。
2.结构灵活性和稳定性:在辅助应用中,例如可穿戴技术中使用的机器人软抓手,抓手的结构灵活性和稳定性非常重要。然而,可穿戴系统是更面向实际应用的系统设计。这造成了软抓手的研究与可穿戴系统的需求之间的脱节。如何为整个系统设计更加智能、灵活的材料和结构研究,是有效提高机器人软抓手在辅助应用中适应性的重要内容。
3.食品行业使用的机器人软抓手需要保证机器人软抓手与食品之间的柔性接触,以实现无损抓取。然而,可用于食品工业的气动夹具和干扰夹具都存在柔性接触问题,特别是应变线性度差和重复精度不足尊龙人生就是博d88。此外,挑战在于如何在不同行业的更复杂的应用中推广和应用机器人软抓手。刚性工业机器人的功能互补可以有效弥补两种机器人系统的缺点,同时还能兼顾灵活性、抓取性和可控性。这将使软机器人软抓手能够更广泛地应用于汽车装配和消费品装配等领域。
4.水下环境的适应性和稳定性:机器人软抓手在水下环境,特别是深海作业中具有实际应用。然而海洋环境中的高环境压力严重限制了软抓手的驱动方式。此外,如何通过复合材料设计,考虑到机器人软抓手的设计价值,设计出更有价值的机器人软抓手。材料的驱动特性和耐腐蚀性,也是水下环境的重要研究课题。
总体而言,机器人软抓手未来的研究方向应着眼于解决成本和效率问题,提高结构灵活性和稳定性,促进其在各行业的应用,并优化其水下抓取性能。通过解决这些挑战,可以进一步开发机器人软抓手并在广泛的应用中使用。
地址:广东省佛山市南海区丹灶镇建沙路联东优谷园1期17栋01座 电话:13760801095 手机:13760801095
Copyright © 2012-2023尊龙人生就是博d88 - Z6尊龙官方网站 版权所有 ICP备案编号:沪ICP备19004880号
